クルマのメカニズム進化論 駆動系編(3)〜4輪駆動〜
軍用やヘビーデューティな仕様が主だった4WDはレオーネの登場によって乗用市場が開拓された。その後、センターデフを採用したフルタイム方式のアウディの登場によって“市民権”を得るようになっていった。
※この記事は、オートメカニック2017年5月号の企画記事を再編集したものです。
●文:オートメカニック編集部
もともと4WDはレース目的で造り出された駆動システムだった
4WDというとヘビーデューティなジープタイプのクルマを連想するが、ガソリンエンジン世界初の4WDはヒルクライムレースのために造り出されたものだった。1902年に現れたオランダのスパイカー兄弟の手による“スパイカー”は世界の4WD 1号車でありながら、2速のトランスファーを持ち、センターデフまで与えられていた。
それ以後も4WDは少数ながら造り出されたが、いずれもレースでの勝利を目的とした特殊なものだった。アメリカではインディ500に出場するミラーが製造され、ヨーロッパでもGPのためにブガッティ、チシタリア・ポルシェなどが登場した。F1では1969年にはロータス63、マクラーレンM7、マトラMS84が登場したが、成功を収めることなく退場した。
レースでは勝利をつかめなかった4WDだが、軍用では高い走破性が評価された。ダイムラー社によって世界初のオフロード用軍用車が製造され、1940年にはアメリカでジープが誕生する。
その後ヨーロッパではランドローバー、アメリカではハードトップを付けた大型4WDが開発され、軍用から民生、レジャーに用いられるようになっていく。国内ではスバルがレオーネバンをベースに4WD化し1972年に発売。ヘビーデューティな4WDに対し、乗用4WDと呼称された。

“ヨンク”といえばジープタイプがすべてだった時代に現れた乗用4輪駆動車がレオーネエステートバン。マニュアルトランスミッションで、2WD、4WDを手動で切り替えた。
アウディ・クワトロの登場、フルタイムで全輪を駆動
1980年、アウディ・クワトロが登場した。フルタイム4WDを標榜し、前後の駆動軸の間にセンターデフを採り入れた。アウディは市販直後、WRCに“クワトロ”を投入。FRによるドリフト全盛だったラリーの世界では4WDを懐疑的に捉えていたが、参戦2年後、アウディにワールドチャンピオンシップをもたらした。アウディはラリーでの成功を格好の宣伝材料として、ロードゴーイング4WDの新しい世界を切り開いたのだ。
ビスカスカップリングの実用化も4WDの世界を押し広げた。西ドイツのビスコドライブ社によって開発されたそれはシンプルな構造ながら、主駆動軸と従駆動軸の間に回転差が生じると、自動的に動力を伝えるという特性を持っている。
国産車で最初にこれを採用したのは1986年のニッサン・パルサーで、GNKと栃木富士産業のジョイントベンチャーであったビスコドライブジャパンによって供給された。以後、低コストの4WDとして定着し、今では多くの軽自動車にも採り入れられている。

乗用4輪駆動車に革命をもたらしたアウディ・クワトロ。センターデフを備えた常時4WD。新しい駆動方式の登場には懐疑的な意見も見受けられた。

アウディはクワトロをWRCに登場させ、女性ドライバーが初ウィナーとなった。これによって4WDのハンドリングへの懐疑が払拭された。
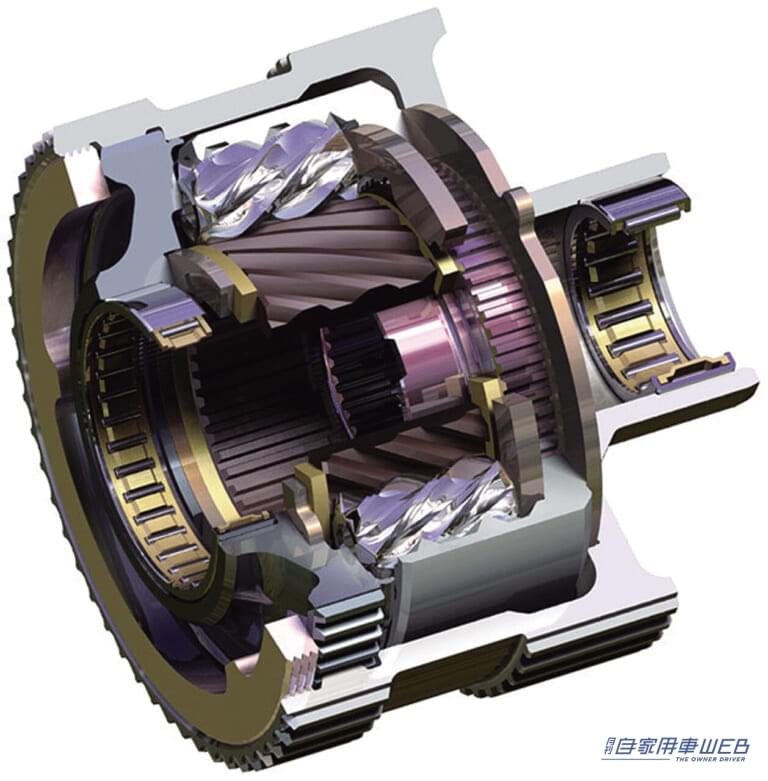
1986年からアウディのセンターデフに用いられたトルクセンシング型。遊星歯車で構成され、かかるトルクによって解放、締結が自動的に行われる優れた構造だ。
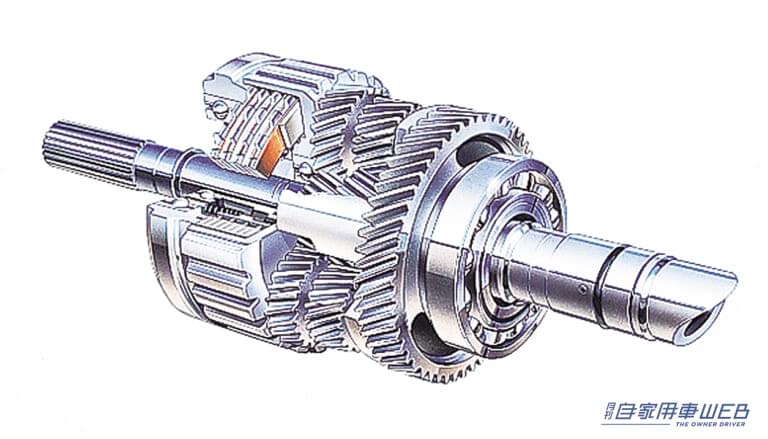
多板クラッチと遊星歯車で構成されたスバルのVTDと呼称されるセンターデフ。スバルは車種によって4WDシステムを使い分けてきた。
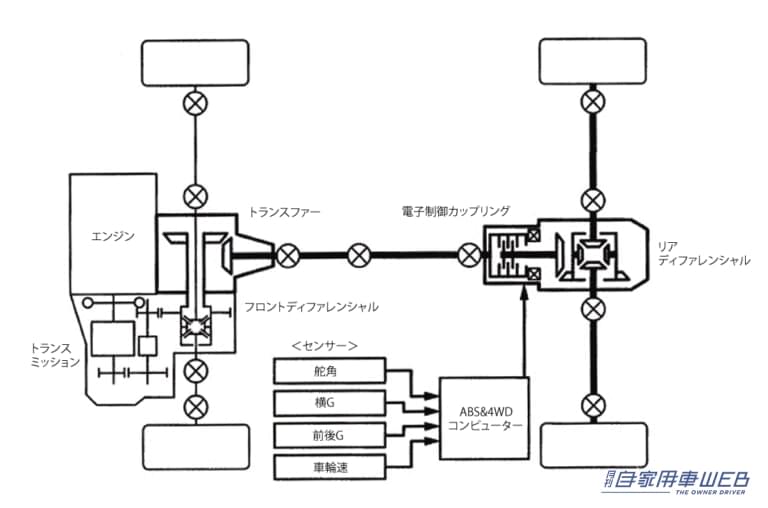
4WDは前後の駆動配分だけでなく、左右の駆動配分も制御し、操縦性を向上させる時代に入った。ニッサン・ジュークは電子制御カップリングをリヤに設け、操縦性を向上。
4WDのメカニズムは大きく4種に分類
4つのタイヤを駆動する4WDにも様々な種類がある。パートタイム4WD、オンデマンド4WD、フルタイム4WD、アクティブトルクスプリット4WDの4種に大きく分類できるが、それらの方式の中で、動力分配機構やセンターデフにも違いがある。また、FR車をベースにしたものとFF車をベースにしたもの、縦置きエンジン、横置きエンジンなどによっても分類できる。
前後の駆動配分にもさまざまなバリエーションがある。電子制御方式では0対100から50対50の間で、路面状況やグリップ状況に合わせて最適に制御されるものもある。
モーターとのハイブリッド駆動を備えたものも登場した。トヨタ、ニッサンはスリップしやすい路面での駆動力を補うものとしてサブ的なモーターを後輪に取り入れた車種をラインナップしているが、ホンダ・NSXは前輪に二つのモーターを備え、トルクベクタリングを可能にし、積極的に操縦性に関わらせる方式を採用している。
4WDの代表車、“ジープ”のイメージとは大きく変わり、現代の4WD車は様々なメカニズムによって成り立っている。
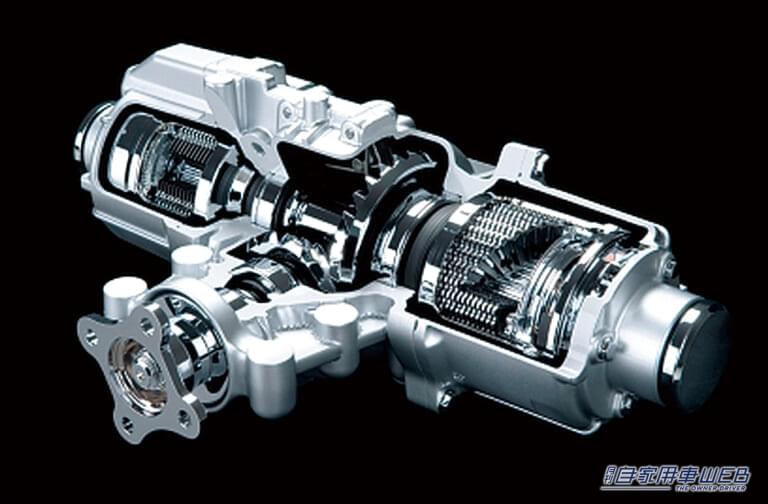
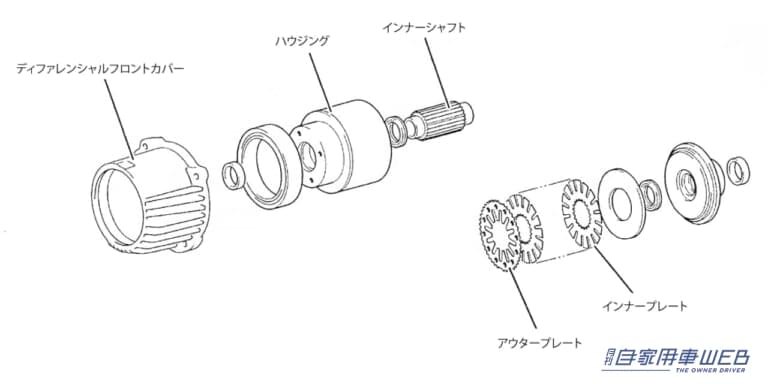
アクティブ4WD。電子制御によって多板クラッチの締結を制御し、運転状況に応じて前後の駆動配分を制御する。図は1998年に登場したトヨタアクティブトルクコントロール。
ハウジングの中に複数の向かい合わせたクラッチを内蔵し、粘度の高いオイルを封入したビスカスカップリング。オイルのせん断抵抗によって動力を自動断続する。
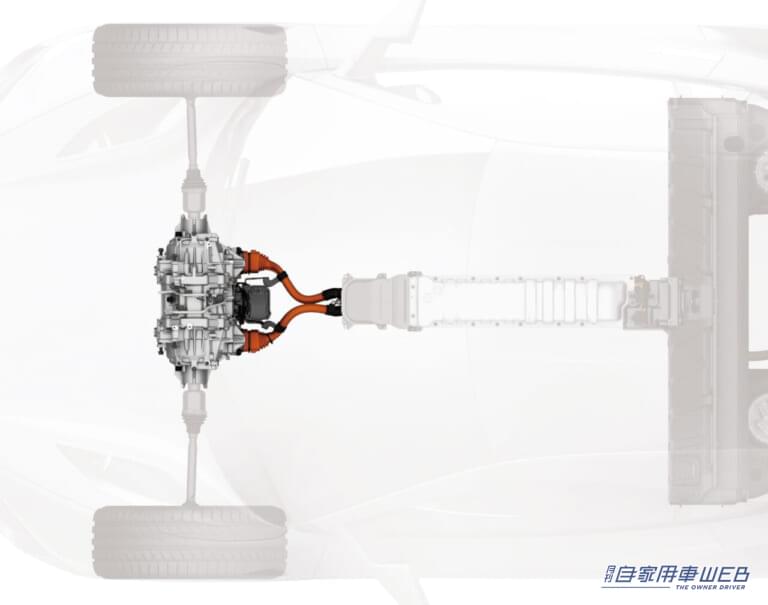
新世代の4WD。ホンダ・NSXは後輪をエンジンとモーターで、前輪は左右二つのモーターで駆動する。加速性能だけでなく、ライントレース性能も高いレベルで追求されている。
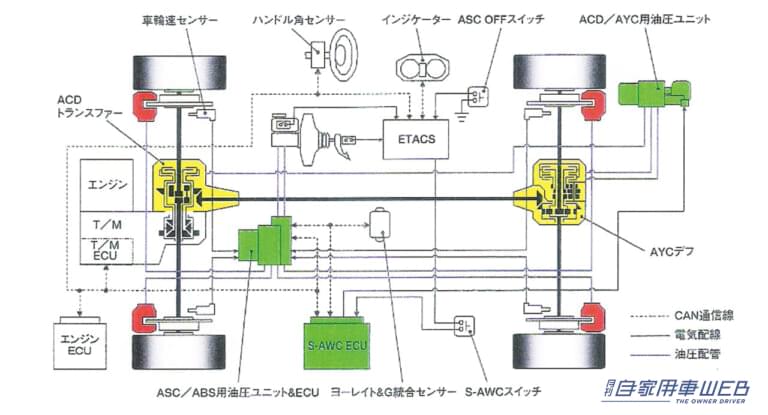
前後、左右のトルク制御システムの塊のようだったランサーエボリューションの4WDシステム。ターマックでもグラベルでもドライバーの意のままに操縦が可能だった。
※掲載内容は公開日時点のものであり、将来にわたってその真正性を保証するものでないこと、公開後の時間経過等に伴って内容に不備が生じる可能性があることをご了承ください。※特別な表記がないかぎり、価格情報は税込です。
最新の関連記事(旧車FAN)
今も息づく農業機械の魂、ランボルギーニ・トラクター フェラーリと双璧をなすイタリアのスーパースポーツカーメーカー「ランボルギーニ」。創業者のフェルッチオ・ランボルギーニは大の車好きで、自らがチューニン[…]

クルマは、まだまだ普通のサラリーマンに高嶺の花だった 1966年がマイカー元年、すなわち国民が自家用車を持ち始めた年というのは、多くの専門家が認めるところです。なぜならこの年に、日産のサニーとトヨタの[…]

〝技術の日産〟の名を轟かせたダットサン スバル360の登場で、軽乗用車は庶民のマイカー候補として熱い視線を浴びるようになり、1960年代になると、マツダやスズキ、三菱などが続々と新型軽乗用車を投入しま[…]

バラードスポーツCR-X(1983年~) MM(マンマキシマム・メカミニマム)思想から生まれた軽量FF2+2スポーツ。スライドレールなしに大きな開口部を誇った電動アウタースライドサンルーフや低ボンネッ[…]

“デートカー”というバブルの落とし子 「S13型シルビア」が発売されたのは1988年です。 この当時はまさにバブル景気が最高潮の時期で、誰もが浮かれまくっていました。世間では「カネ余り」という言葉まで[…]

最新の関連記事(ニュース)
来年開催のGREEN×EXPO 2027特別仕様ナンバーが交付受付中 最近、よく見かけるようになった図柄ナンバープレート。さりげないイラストが特別感を醸し出してくれる。全国のユーザーが申請することがで[…]

今も息づく農業機械の魂、ランボルギーニ・トラクター フェラーリと双璧をなすイタリアのスーパースポーツカーメーカー「ランボルギーニ」。創業者のフェルッチオ・ランボルギーニは大の車好きで、自らがチューニン[…]
サーフ文化と電動MINIが融合 オーストラリアで誕生したDeus Ex Machina(デウス・エクス・マキナ)は、単なるファッションブランドの枠を超え、モーターサイクル、サーフィン、スケートボードと[…]

国内最大級のファンイベント。今年は紅葉の季節に開催 詳細な実施内容は、順次オフィシャルウェブサイトなどで発信 「ルノーカングージャンボリー」は、ルノーカングーのオーナーのみならず、車種を問わずクルマで[…]

チームカラーとして継承してきた赤・黒・白を基調に、グリーンのアクセントカラーをプラス ホンダは、2026年のSUPER GT GT500クラスに新型マシン「PRELUDE-GT(プレリュードGT)」で[…]
人気記事ランキング(全体)
ロッドを効率良く収納できる革新的なアイテム アウトドアアクティビティの中でも、愛好者が多いジャンルの1つに釣り(フィッシング)が挙げられる。釣りは、様々な道具を使用し、ハマるとどんどんと必要なタックル[…]

無骨すぎず、スマートすぎず、大自然も街中も良く似合う走る隠れ家 かーいんてりあ高橋のリラックスワゴンKAKUKAKUは、同社の2人旅スタンダードモデル、リラックスワゴンタイプ1のレイアウトをベースに開[…]

車中泊を安心して、かつ快適に楽しみたい方におすすめのRVパーク 日本RV協会が推し進めている「RVパーク」とは「より安全・安心・快適なくるま旅」をキャンピングカーなどで自動車旅行を楽しんでいるユーザー[…]

ドアのストライカー部分の隙間を埋めてボディの剛性をアップ 今回紹介するアイテムはアイシンのドアスタビライザー(※株式会社アイシンの登録商標)は、車両のドアをボディと一体化させることで、走行性能を向上さ[…]

車中泊を安心して、かつ快適に楽しみたい方におすすめのRVパーク 日本RV協会が推し進めている「RVパーク」とは「より安全・安心・快適なくるま旅」をキャンピングカーなどで自動車旅行を楽しんでいるユーザー[…]

最新の投稿記事(全体)
伝説の名車「マイバッハ・ツェッペリン」に敬意を表したデザインを採用 「Mercedes-Maybach S 680 V12 Edition」は、究極のラグジュアリーを追求するマイバッハの名を冠する特別[…]

小型モーターがエンジンをアシスト 導入されたマイルドハイブリッドモデルには、小型モーターがエンジンをアシストする48Vマイルドハイブリッドシステムを搭載。スムーズな発進や加速、燃料消費率の向上、そして[…]

猛暑も怖くない機能が詰まったキャビン空間 東和モータースの最新モデル「バディ108」は、ダイハツのハイゼットトラックをベースにした軽キャンピングカー。軽自動車特有の取り回しの良さと、本格的なキャンピン[…]

コンパクトなのに本格派。商用バンベースの挑戦 Rakuneru Leiは、タウンエースをベースに仕立てられたミニバンサイズのキャンピングカーだ。取り回しやすいコンパクトなボディはそのままに、キッチンを[…]

車中泊を安心して、かつ快適に楽しみたい方におすすめのRVパーク 日本RV協会が推し進めている「RVパーク」とは「より安全・安心・快適なくるま旅」をキャンピングカーなどで自動車旅行を楽しんでいるユーザー[…]
- 1
- 2